Technische Daten Servoantrieb BLTDC 56/24/60
Elektronisch kommutierter echter Gleichstrommotor (BLTDC®) nach patentiertem Axialfluss-Doppelscheibenläuferprinzip mit fortlaufender Kommuierung
| Parameter | Symbol | Wert | Einheit |
|---|---|---|---|
| Nennspannung | UB nenn | 24 | V |
| Leerlaufdrehzahl bei UB nenn | n0 | 2500 | min-1 |
| Anhaltedrehmoment bei UB nenn | MH | 1,0 | Nm |
| maximales Dauerdrehmoment | MK1max | 0,25 | Nm |
| Drehmomentdichte Dauerdrehmoment Spitzendrehmoment | dM | 0,58 2,32 | Nm/kg |
| äquivalenter Ankerwiderstand bei 20 °C | RA | 1,1 | W |
| Drehzahlkonstante | kn | 104 | min-1/V |
| Generatorspannungskonstante | kE | 8,9 | mV/min-1 |
| Drehmomentkonstante | kM | 90 | mNm/A |
| Stromkonstante | kI | 11,1 | A/Nm |
| Kennliniensteigung | Δn / ΔM | 1,3 | min-1/mNm |
| maximaler Wirkungsgrad | η | 80 | % |
| Motorkonstante (Gütefaktor) | μM | 86 | mNm/W½ |
| normierter Gütefaktor | μ°M | 0,173 | |
| mechanische Anlaufzeitkonstante | τm | 12 | ms |
| Rotorträgheitsmoment | J | 85 | kg mm² |
| Winkelbeschleunigung | αmax | 11765 | s-2 |
| Polzahl | 2p | 4 | |
| Anzahl Encoderimpulse | 816 | /360 ° | |
| Motorlänge | l | 44 | mm |
| Außendurchmesser | d | 66 | mm |
| Gesamtmasse mit Kommutator | m | 0,49 | kg |
Drehmoment-Drehzahl-Kennlinie bei PWM = 100 % (vor-/rückwärts)
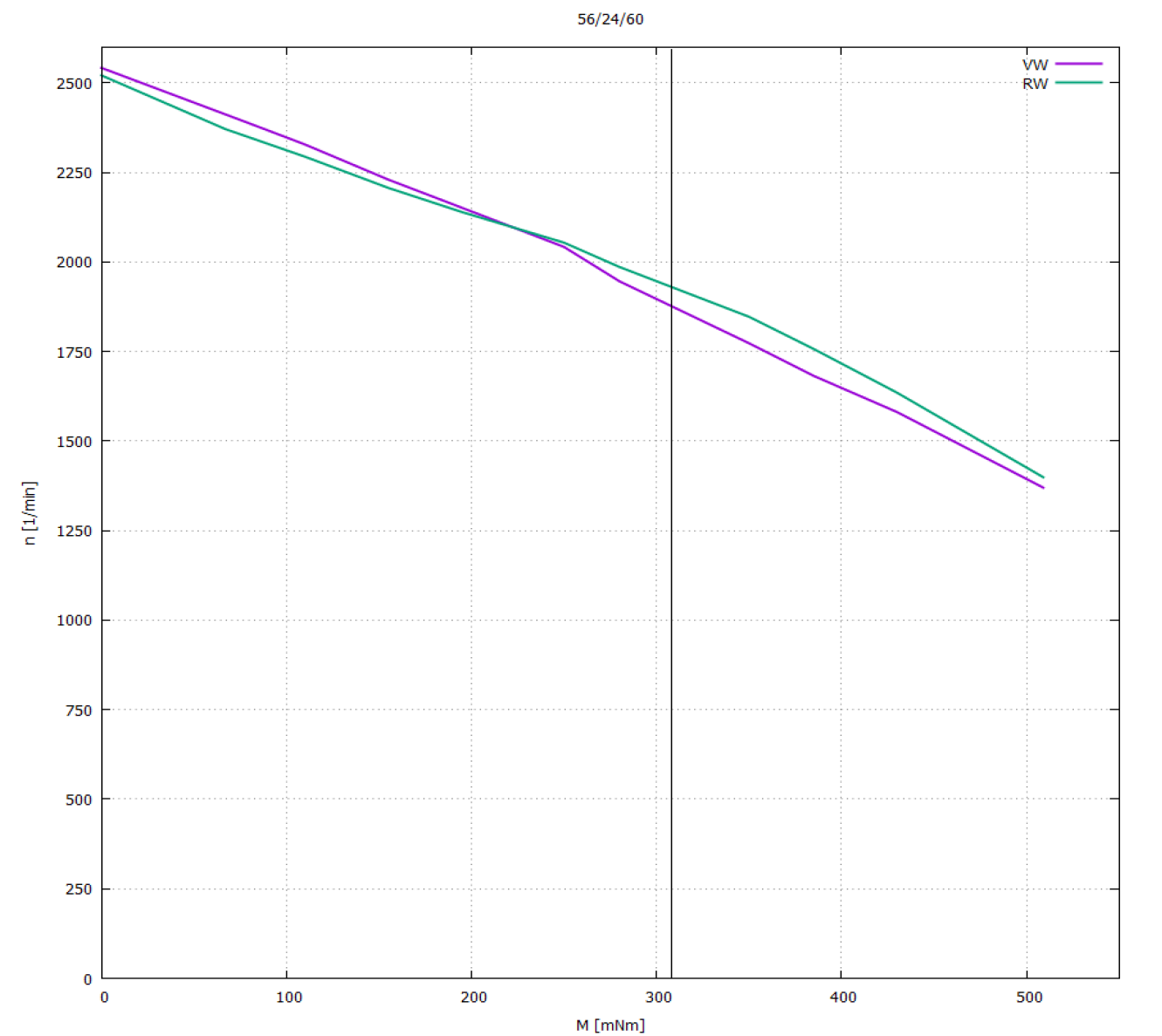
Das gesamte dargestellte Kennlinienfeld ist kurzzeitig nutzbar. Das Dauerdrehmoment ist aufgrund der Wärmeentwicklung bei 25 °C Umgebungstemperatur auf die dargestellte Grenze bei 0,31 Nm einzuschränken. Für Drehmomente oberhalb 0,5 Nm wird eine Strombegrenzung wirksam.
Typische Anschlussbelegungen
Der BLTDC-Motor kann ohne weitere Ansteuerelektronik für die folgenden Anwendungsfälle verwendet werden.
Darüber hinaus ist eine digitale Bewegungssteuerung per Motion-Controller via Bussystem möglich.
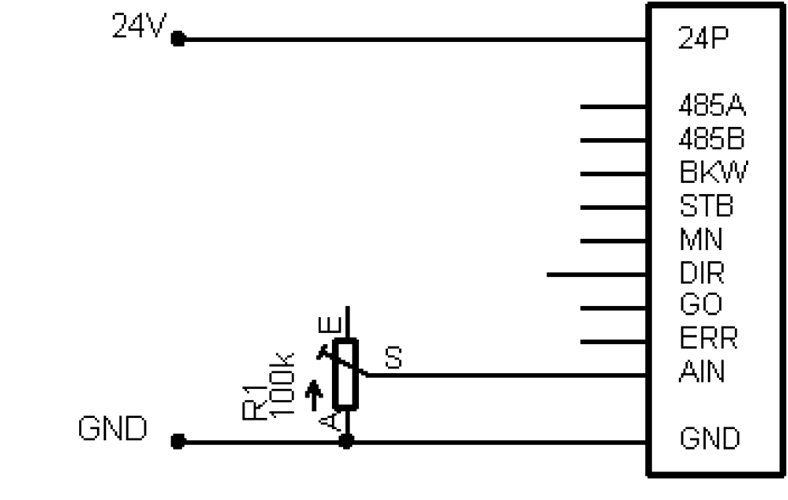
Als ungeregelter Gleichstrom-Motor mit Widerstandsvorgabe
Über den Widerstand an AIN kann das Drehmoment oder die Drehzahl fest eingestellt (Festwiderstand) oder verändert werden. Dargestellte Drehrichtung rechts, für Drehrichtung links Eingang DIR mit GND verbinden.
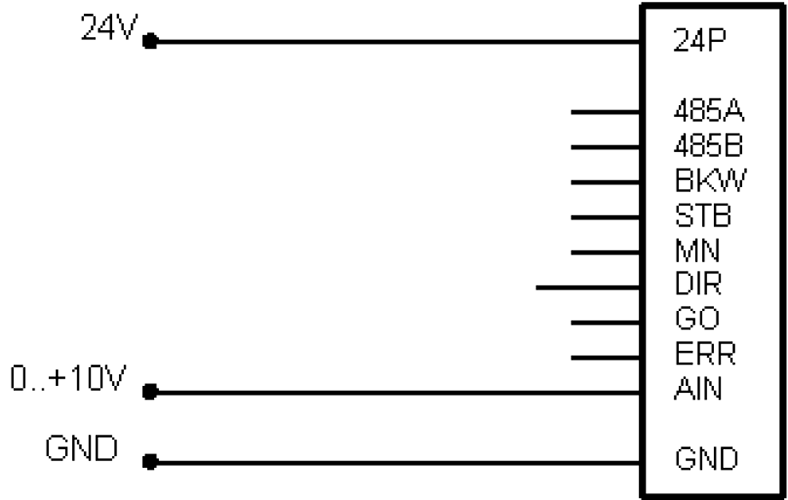
Als ungeregelter Gleichstrom-Motor mit Spannungsvorgabe
Über die Spannung an AIN kann wie bei DC-Motoren das Drehmoment oder die Drehzahl gesteuert werden. Dargestellte Drehrichtung rechts, für Drehrichtung links Eingang DIR mit GND verbinden.
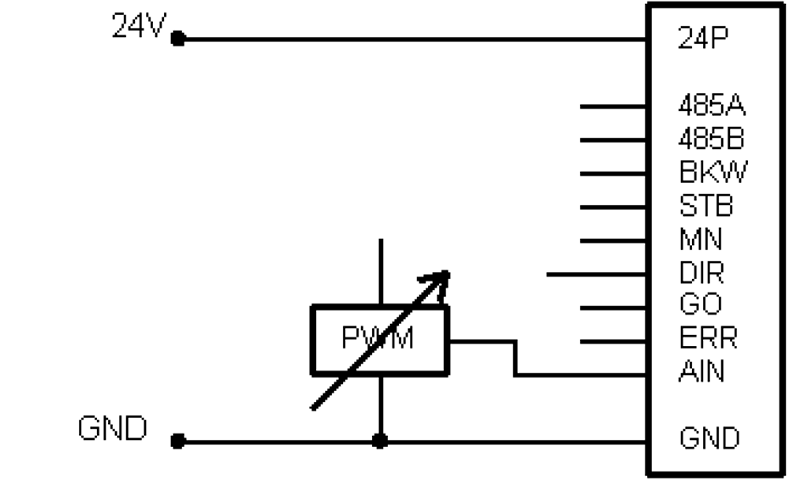
Als ungeregelter Gleichstrom-Motor mit PWM-Steuerung
Über das Tastverhältnis einer Pulsweitenmodulierten Spannung (Amplitude 10 V) an AIN kann das Drehmoment oder die Drehzahl gesteuert werden. Dargestellte Drehrichtung rechts, für Drehrichtung links Eingang DIR mit GND verbinden.
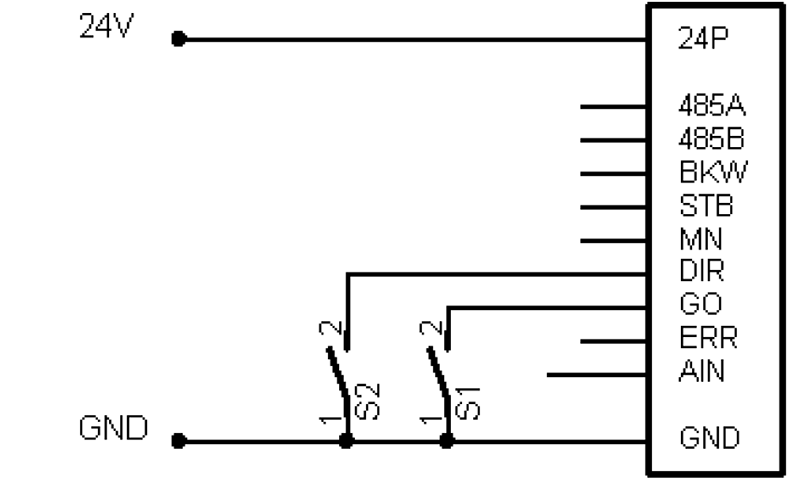
Bewegungssteuerung mit Schaltern
Zur Verwendung mit oben angegebenen Anschlussbildern S1 ein/aus → Motor Start/Stopp, S2 ein/aus → Drehrichtung links/rechts.
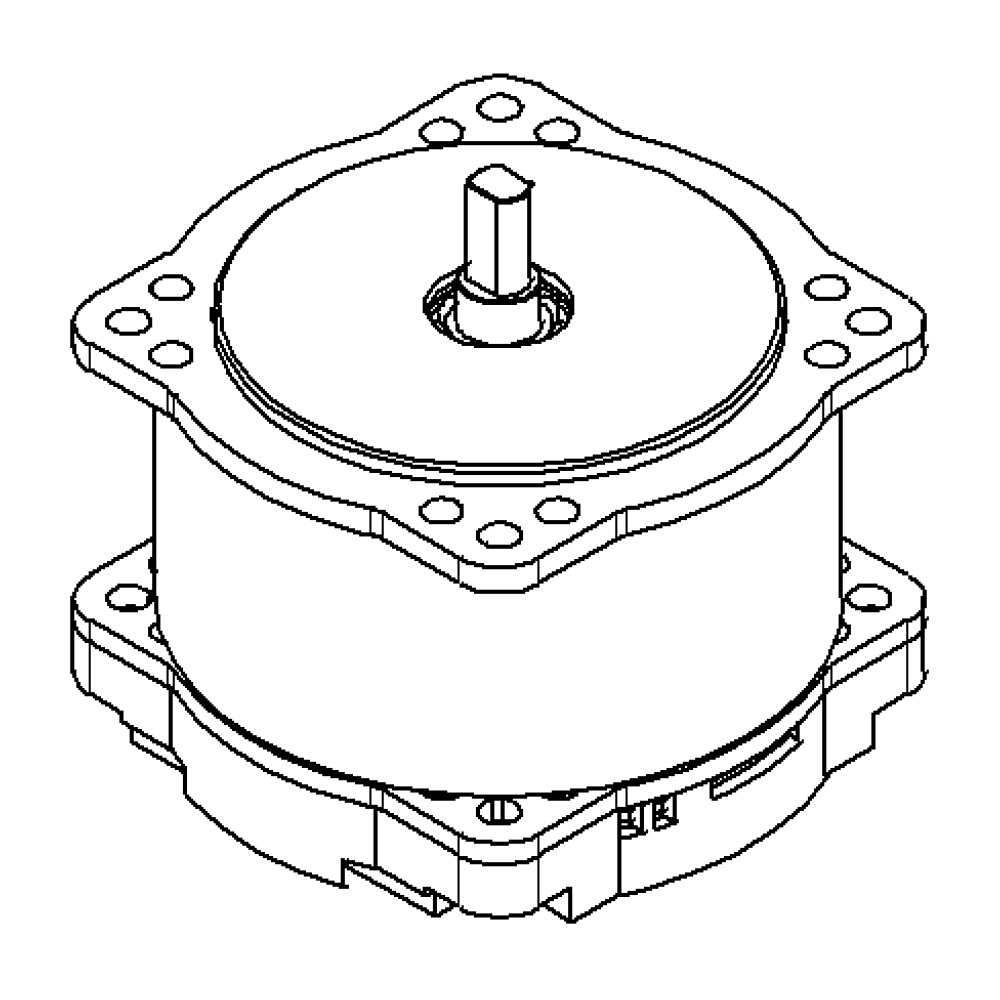
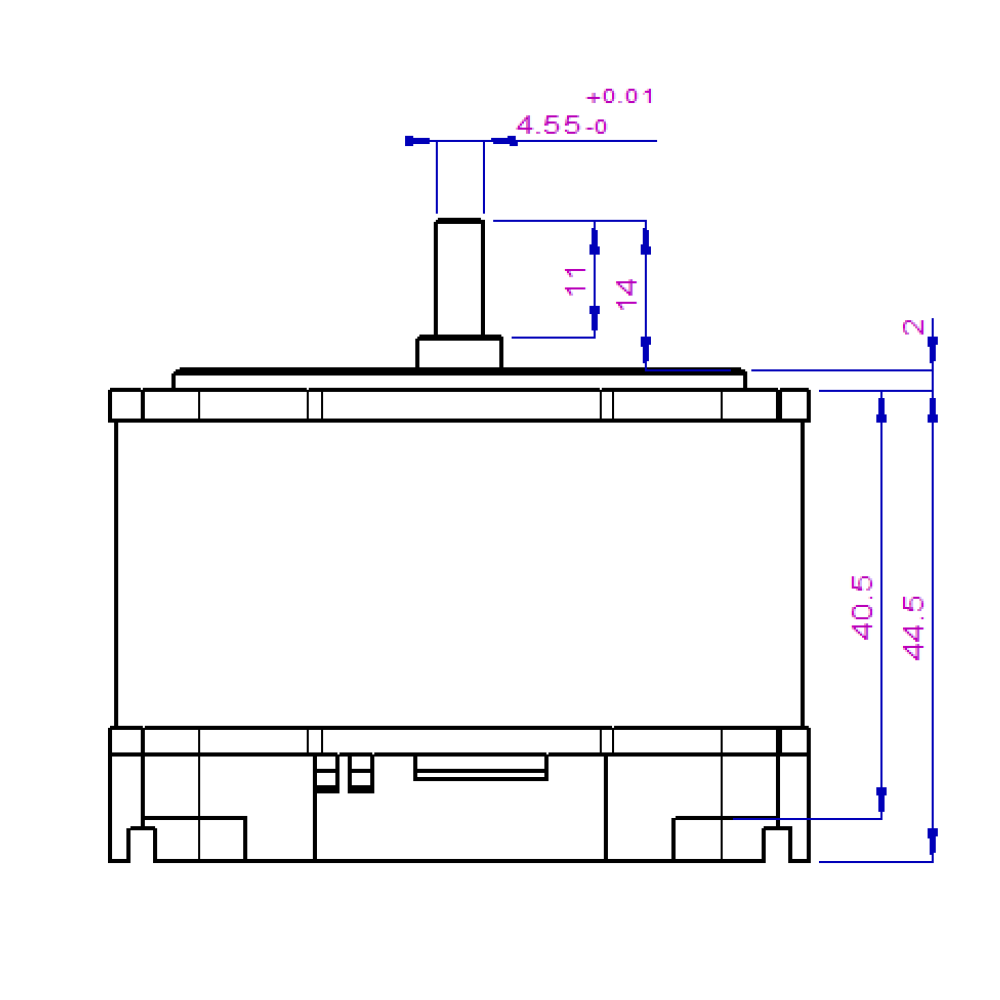
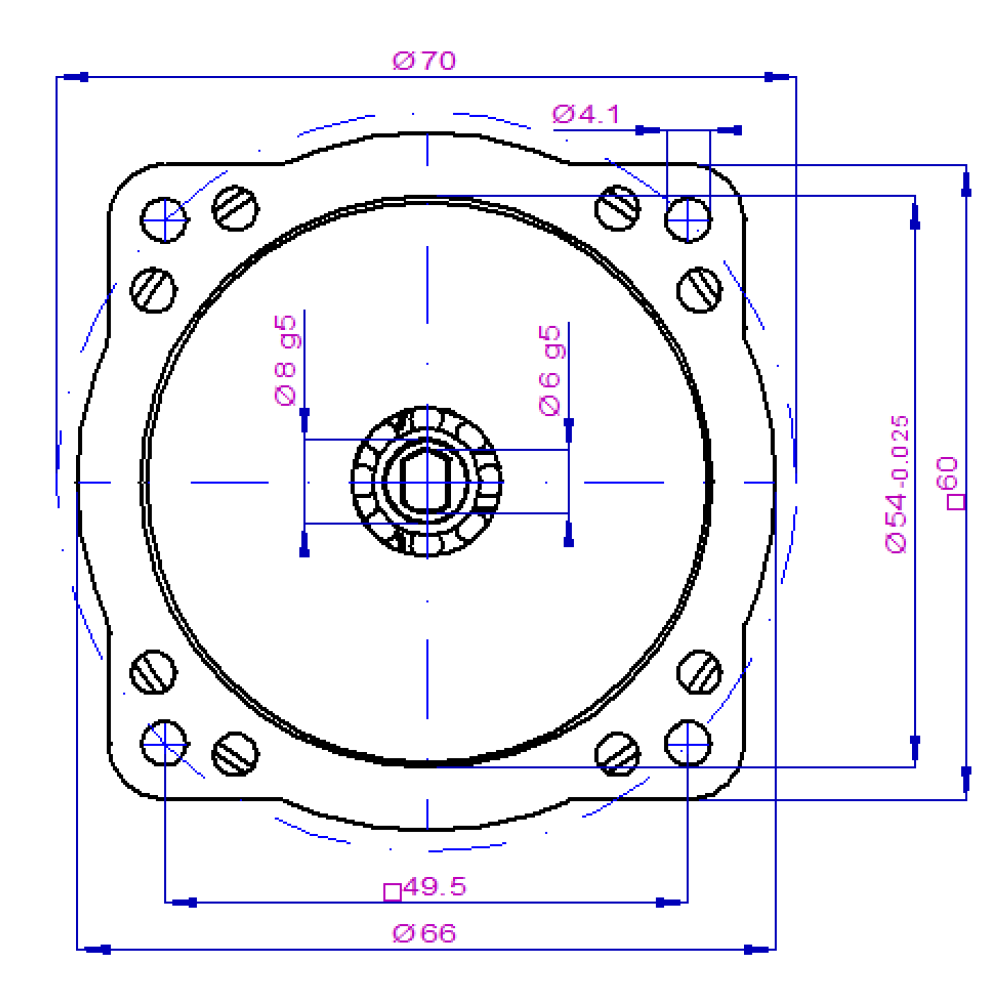
Mechanische Abmessungen
Variante A
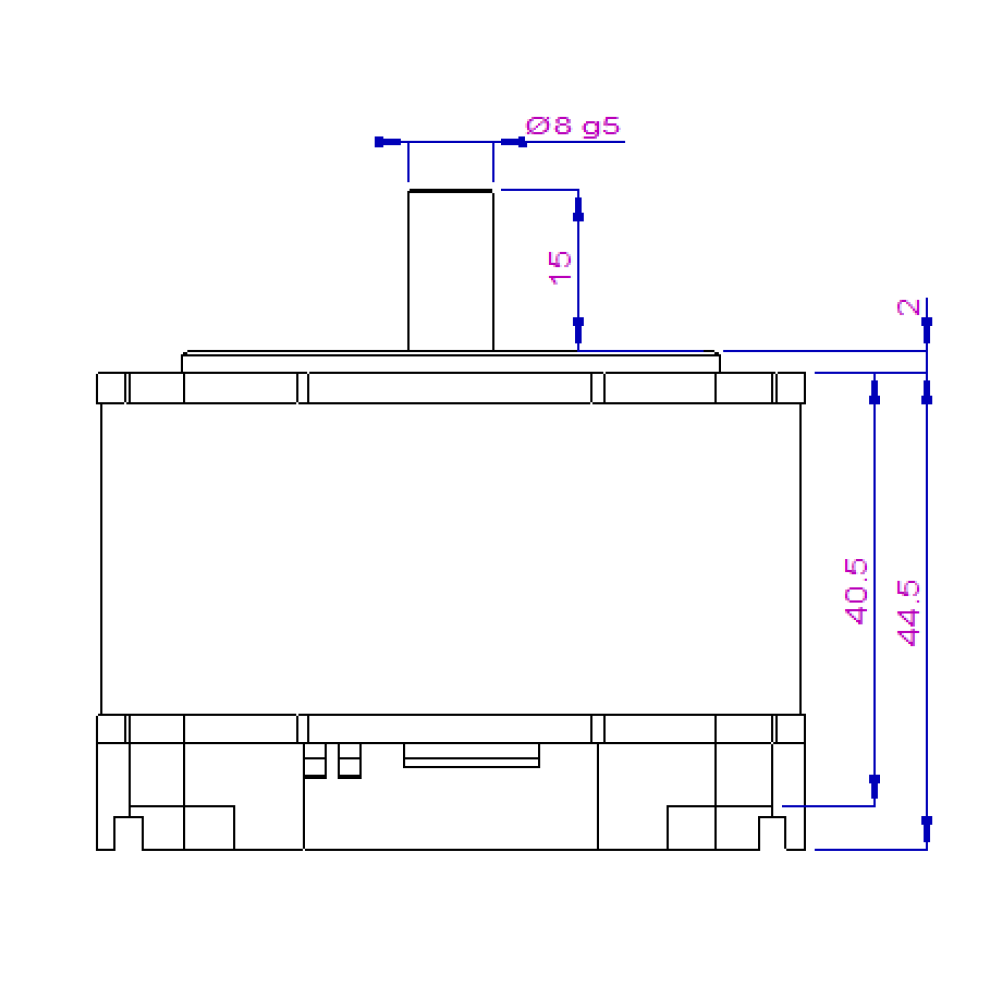
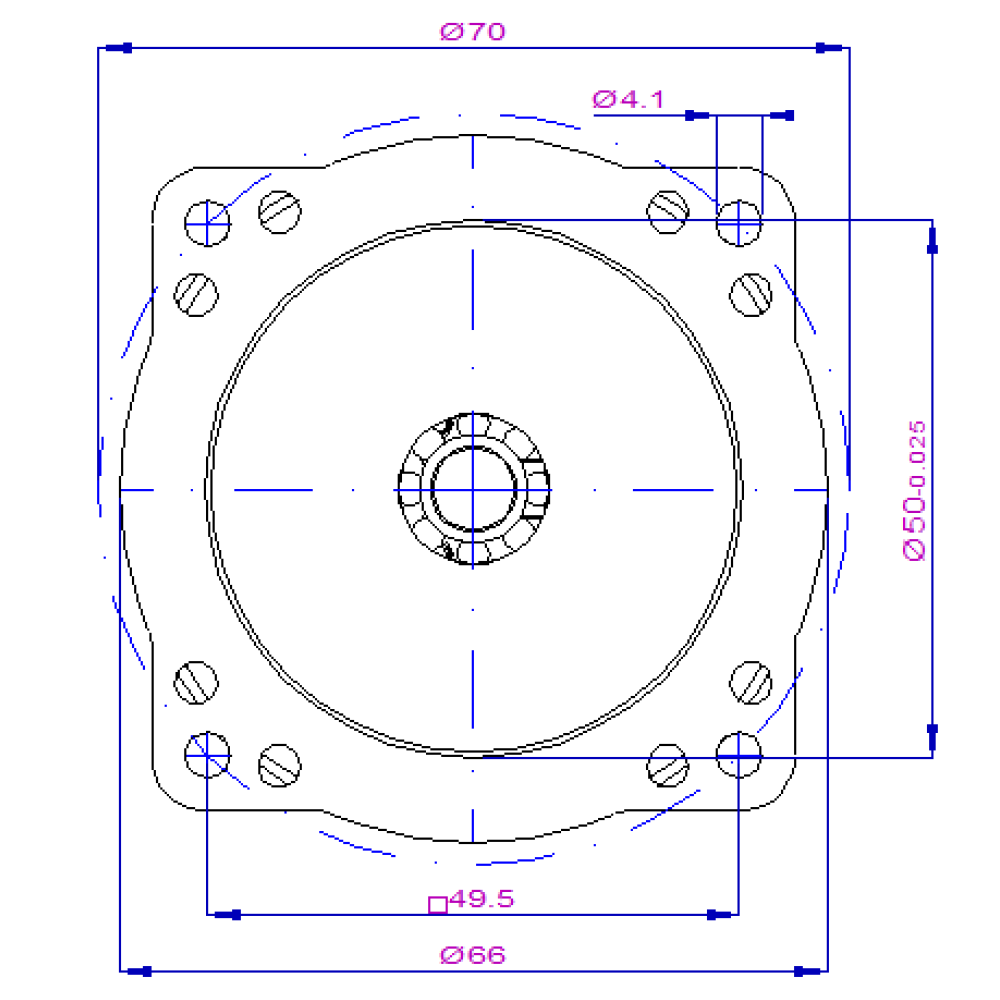
Mechanische Abmessungen
Variante B